في ٩٩% من الحالات يتم تثبيت كاميرا الدرون بزاوية ثابتة بالنسبة للدرون اثناء الطيران. ماذا لوكنت تريد جعل تلك الزاوية ثابتة بالنسبة لخط الافق وليس زاوية طيران الدرون؟

ان نظام بيتا فلايت يحتوي على ميزة Servo Tilt مع نظام Camera stabilization والتي تمكن الطيار من استخدام اذرعة ال Servo لموازنة او تثبيت الكاميرا على زاوية معينة بغض النظر عن زاوية الدرون. هي نوع من ال Gimbal البسيط او لنقل ذو دقة منخفضة.

و ال servo هو محرك يحتوي على ذراع يمكن التحكم بها عن طريق منظم الطيران. يمكنك ال servo من تحريك جناح او كاميرا او فتح باب صندوق.

كيف نفعل ميزة تثبيت الكاميرا؟
يمكنك في صفحة ال Configuration من تفعيل ميزة ال Servo Tilt والتي تعطيك القدرة على استخدام ال gyro الموجود في منظم الطيران للتحكم بال Servo.

بعد تفعيل ال Servo Tilt تحتاج الى تفعيل وضع تثبيت الكاميرا او Camera Stabilization او باختصار Camstab وهو موجود في قسم اوضاع الطيران في بيتا فلايت:
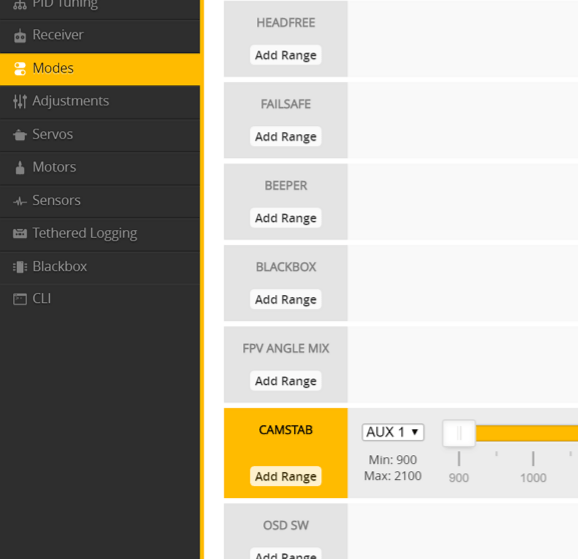
يمكنك جعل الوضع مفعل بشكل مستمر (بجعل مدى التفعيل كامل) او يمكنك ربطه باحد قنوات الريموت وتفعيله عن الضغط على زر معين.
الان تحتاج التاكد من ان وضع اتزان او تثبيت الكاميرا فعال وذلك عن طريق صفحة ال Motors. فكلما تغيرت زاوية الدرون يجب ان تتغير قيم ال Servo 1 و Servo 2 وهما يتحركان مع تغير زاوية ال Roll وال Pitch.

بعد ذلك تحتاج الى تعيين مخرج لاشارة التحكم من منظم الطيران الى احد المنافذ او نقاط توصيل المحركات الغير مستخدمة. يمكنك معرفة وتعيين ارقام المنافذ عن طريق امر Resource. تحتاج لتكرار العملية واختيار منفذ مختلف لكل servo .

لنفترض انك تريد توصيل ال Servo مكان نقطة التحكم لاضاءة ال LED في الصورة اعلاه، عندها تحتاج الامرين التاليين:
resource LED_STRIP 1 none
resource SERVO 1 A01
والخطوة الاخيرة هي توصيل ال servo على منظم الطيران. يحتوي ال servo على ٣ اسلاك: اصفر (او برتقالي) للتحكم وكذلك احمر واسود (او بني) للطاقة.
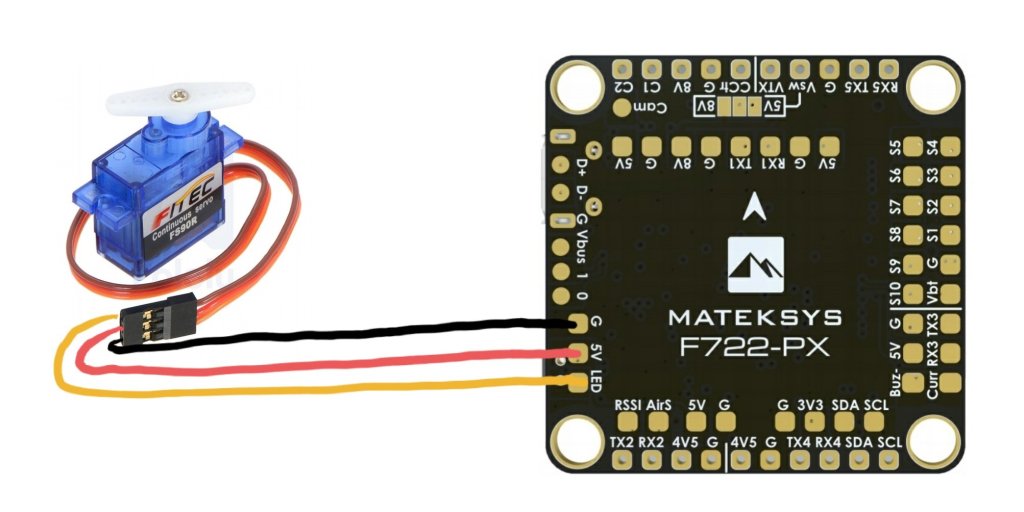
يتم توصيل سلك الاشارة الاصفر (او البرتقالي) الى النقطة التي اخترتها سابقا اما السلك الاحمر والبني (او الاسود) فيتم توصيلهما الى اي نقطتين لتوفير الطاقة المطلوبة لل Servo.
الان سيتم التحكم بذراع ال servo من خلال زاوية منظم الطيران وبالتالي تستطيع تثبيت زاوية الكاميرا من خلاله ، ويمكنك ضبط الاعدادات المتقدمة للاذرعة عن طريق صفحة Servos .
تحياتي
