دليلك المبتدئ لفهم مكونات طائرة الـ FPV: كيف تعمل هذه “الأسلاك المعقدة”؟
قد يبدو النظر إلى طائرة FPV لأول مرة أمراً مرعباً؛ فوضى من الأسلاك، والقطع الإلكترونية الدقيقة، ومصطلحات غريبة مثل VTX و ESC و UART. لكن في الحقيقة، منظومة الطائرة تعمل بشكل منطقي وبسيط جداً بمجرد فهم دور كل قطعة.
أولاً: كيف تصل أوامر التحكم إلى المحركات؟
تبدأ الرحلة من يديك وتنتهي بدوران المراوح عبر المسار التالي:
- جهاز الإرسال (Transmitter): هو الريموت الذي تمسكه، حيث يرسل إشارات لاسلكية (غالباً بتردد 2.4 جيجاهرتز).
- المستقبل (Receiver): قطعة صغيرة مثبتة على الطائرة تلتقط إشارة الريموت وترسلها إلى “عقل” الطائرة.
- متحكم الطيران (Flight Controller – FC): هو “المخ” الذي يعالج الأوامر ويقرر كيف يجب أن تتصرف الطائرة.
- منظم السرعة الإلكتروني (ESC): يأخذ الأوامر من الـ FC ويوزع الطاقة من البطارية إلى المحركات ليحدد سرعة دورانها بدقة.
ثانياً: كيف ترى ما تراه الطائرة؟ (منظومة الفيديو)
هذا هو الجزء الذي يجعل الـ FPV تجربة غامرة، ويتكون من ثلاث قطع أساسية:
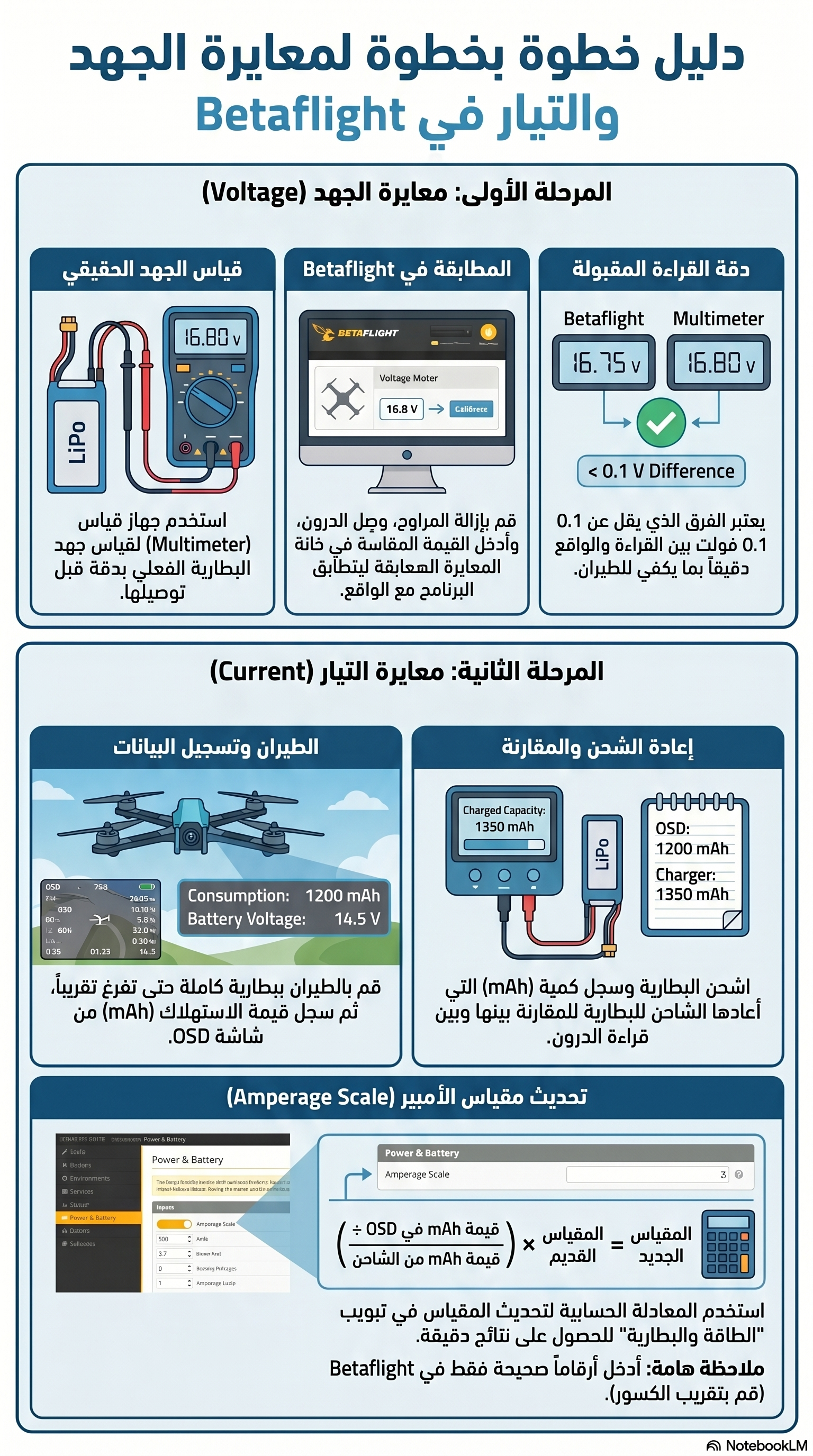
- الكاميرا: تلتقط الفيديو وترسله إلى متحكم الطيران لإضافة بيانات الـ OSD (مثل فولتية البطارية).
- مرسل الفيديو (VTX): يبث الصورة لاسلكياً عبر الهوائي (غالباً بتردد 5.8 جيجاهرتز).
- النظارات (Goggles): تحتوي على مستقبل فيديو يعرض الصورة أمام عينيك مباشرة لتشعر وكأنك داخل الطائرة.
ثالثاً: البطاريات – لغة الـ “S” والـ “mAh”
تستخدم طائرات الـ FPV بطاريات LiPo (ليثيوم بوليمر) لأنها قوية جداً وتفرغ الطاقة بسرعة. إليك ما تحتاج معرفته:
- الجهد (Voltage): يُقاس بعدد الخلايا (S)؛ فبطارية 1S (3.7V) مخصصة للطائرات الصغيرة، بينما 4S أو 6S للطائرات القوية والسريعة.
- السعة (Capacity): تُقاس بالـ mAh؛ فكلما زاد الرقم، زادت مدة الطيران ولكن زاد وزن البطارية.
- التوافق: تأكد دائماً أن الـ FC والـ ESC في طائرتك يدعمان عدد خلايا البطارية التي تنوي استخدامها لتجنب احتراق القطع.
رابعاً: المحركات والبروتوكولات الحديثة
تعتمد الطائرات الحديثة على محركات Brushless (بدون فحمات) لسرعتها وعمرها الطويل. أما بالنسبة للتواصل اللاسلكي، فيعتبر بروتوكول ExpressLRS (ELRS) هو المعيار العالمي حالياً بنسبة 99%، نظراً لقوة مداه وسهولة استخدامه.
نصيحة ذهبية للمبتدئين
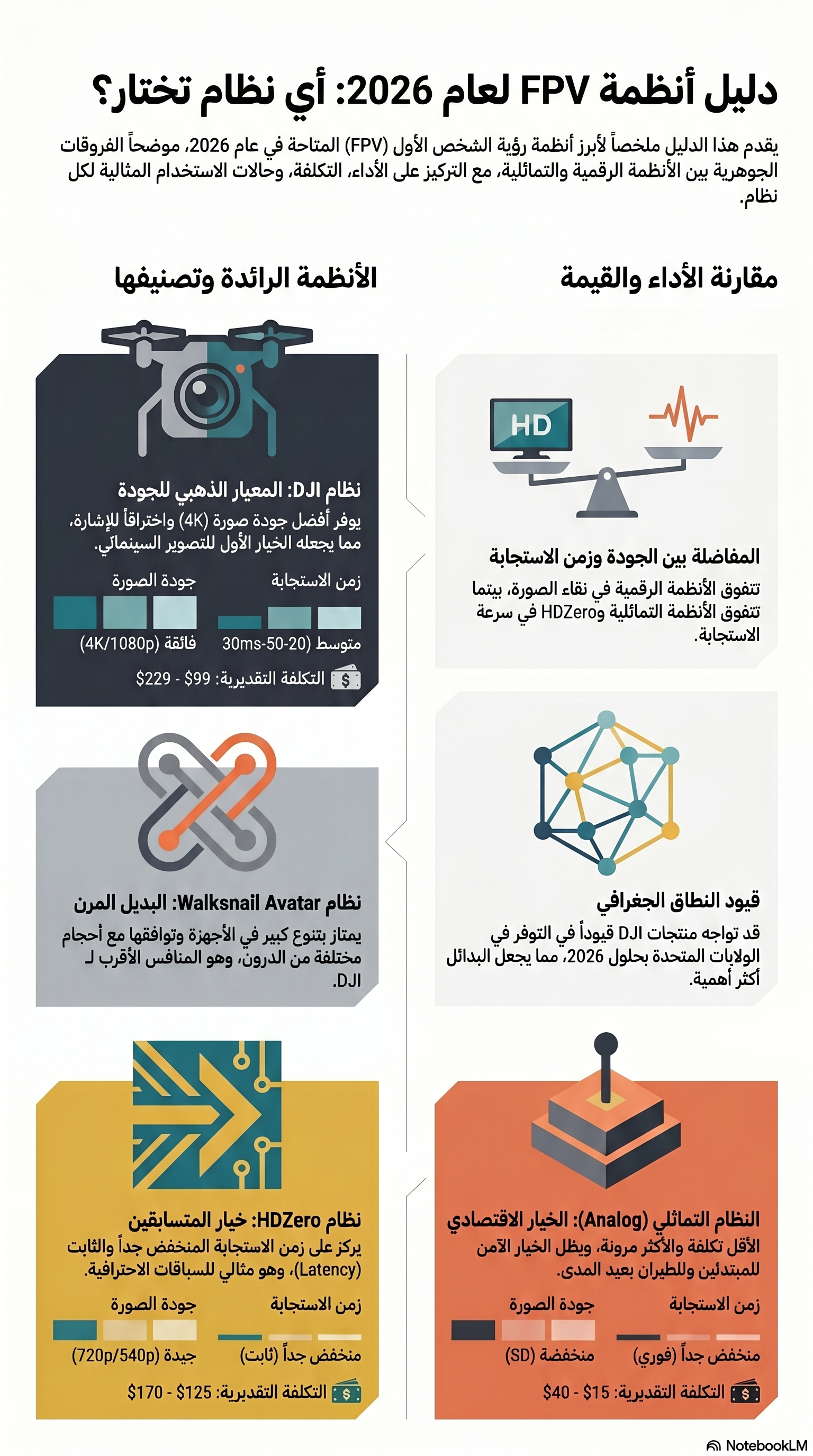
عند بناء أو شراء طائرتك الأولى، انتبه لمسألة التوافق. الأنظمة الرقمية (مثل DJI) تعمل فقط مع نظاراتها الخاصة، بينما الأنظمة التناظرية (Analog) تتميز بمرونة عالية حيث يمكنك استخدام أي نظارة مع أي مرسل فيديو طالما أنهما على نفس التردد.
فهم المكونات هو الخطوة الأولى لتصبح طياراً محترفاً قادراً على صيانة طائرتك بنفسك. هل لديك سؤال عن قطعة معينة؟ اترك تعليقك الآن!
كُتب بواسطة: @abhjz
المراجع: دليل المبتدئين الشامل لأجزاء طائرات الـ FPV.